Με αφορμή τη συμμετοχή μου με ομάδα μαθητών σε πολιτιστικό πρόγραμμα με τίτλο «Αποτυπώνοντας πολιτιστικά μνημεία με ρομπότ» θα επεκταθώ λίγο πιο πέρα γενικεύοντας και παρουσιάζοντας τρόπους αποτύπωσης εικόνας με ρομπότ CNC.
Όσον αφορά το Hardware για την κατασκευή ρομπότ CNC προτείνω το OpenBuilds.com μιας και τα υλικά που προσφέρει δίνονται και σε 3D μορφή οπότε μπορεί κανείς να κτίσει πρώτα εύκολα και εικονικά το ρομπότ του με χρήση κάποιου 3D λογισμικού (προτείνω ανεπιφύλακτα το SketchUP το οποίο είναι δωρεάν http://www.sketchup.com/ ), να υπολογίσει το κόστος των υλικών με κάθε λεπτομέρεια και μετά να προχωρήσει στην υλοποίηση. Εάν μάλιστα διαθέτει κανείς και έναν 3D Printer τότε τα πράγματα είναι ακόμα πιο ευνοϊκά από την άποψη ότι μπορεί να τυπώσει εξαρτήματα για να ολοκληρώσει το ρομπότ, ή ακόμα και να το βελτιώσει, δίνοντάς του περισσότερες δυνατότητες.
Συνοψίζοντας η λίστα των ρομπότ που χρησιμοποιώ είναι:

- CNC C-beam (με κάποιες δικές μου τροποποιήσεις και βελτιώσεις), http://openbuildspartstore.com/c-beam-machine-mechanical-bundle/ . Ο λόγος που προτείνω το συγκεκριμένο CNC είναι η ποιότητά του και γιατί μπορεί επίσης να δουλέψει τόσο με Arduino που είναι και το πιο διαδεδομένο, αλλά και ένα πλήθος άλλων πλακετών που υπάρχουν στο εμπόριο.
- Niko’s Egg-painter robot (OpenBuilds). Το ρομπότ αυτό είναι η εξολοκλήρου δικού μου σχεδιασμού και συνεισφορά στην κοινότητα του OpenBuilds. Το μικρό αυτό CNC ρομπότ μπορεί να ζωγραφίζει πάνω σε αυγά και σε σφαιρικές επιφάνειες. Μπορεί να αναπαραχθεί από τον καθένα (αγοράζοντας κάποια υλικά και χρησιμοποιώντας ένα 3D printer), σύμφωνα με τις οδηγίες. http://www.openbuilds.com/builds/niko%E2%80%99s-egg-painter-robot-openbuilds.1953/
- Creatr Leapfrog 3D Printer https://www.lpfrg.com/. Τρισδιάστατος εκτυπωτής (βοηθητικός για την κατασκευή των παραπάνω CNC μηχανών)
Περνάω αμέσως σε μία λίστα με μερικά λογισμικά που ενδιαφέρουν τους περισσότερους με τα οποία μπορούν να μετατρέψουν εικόνα σε μορφή κατάλληλη για ρομπότ αυτού του είδους.
- Inkscape χρήσιμο για μετατροπή εικόνας σε διανυσματική μορφή (από JPG σε SVG) και το οποίο μπορείτε να βρείτε εδώ: https://inkscape.org/en/
- Makercam το οποίο μετατρέπει την διανυσματική εικόνα σε G-κώδικα (αρχεία τύπου NC) τον οποίο χειρίζονται οι CNC μηχανές. Η μετατροπή από SVG σε NC γίνεται on-line στο http://www.makercam.com/ χωρίς να είναι απαραίτητο να εγκαταστήσετε και να τρέξετε makercam τοπικά στον υπολογιστή σας.
- GrblPanel το πιο απλό ελεύθερο και ανοικτό πρόγραμμα που συνεργάζεται με CNC μηχανές (προτείνεται και από το OpenBuilds.com). Μπορείτε να το βρείτε εδώ: https://github.com/gerritv/Grbl-Panel
Παρουσιάζω τώρα δύο παραδείγματα μετατροπής εικόνας για CNC:
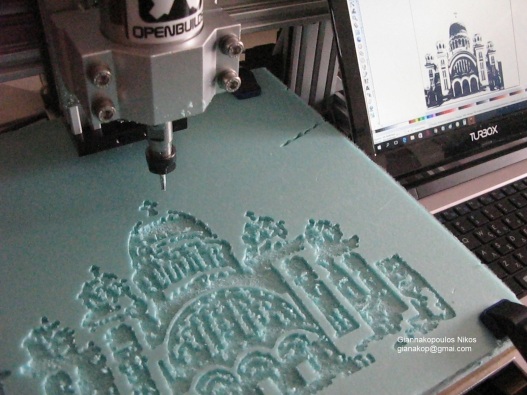
Πρώτα παρουσιάζω την αποτύπωση Ι.Ν. Αγίου Ανδρέα Πάτρας για χάραξη με το CNC C-Beam σε Dow ή σε ξύλο.
Η μετατροπή της εικόνας έχει τα παρακάτω στάδια:
- Φυσική εικόνα τύπου JPG από Internet η φωτογραφική 2. Μετατροπή σε SVG με χρήση του Inkscape. 3 & 4. Μετατροπή σε G–code με χρήση του Makercam και 5α & 5β. χάραξη σε Dow ή σε ξύλο με χρήση του GrblPanel.
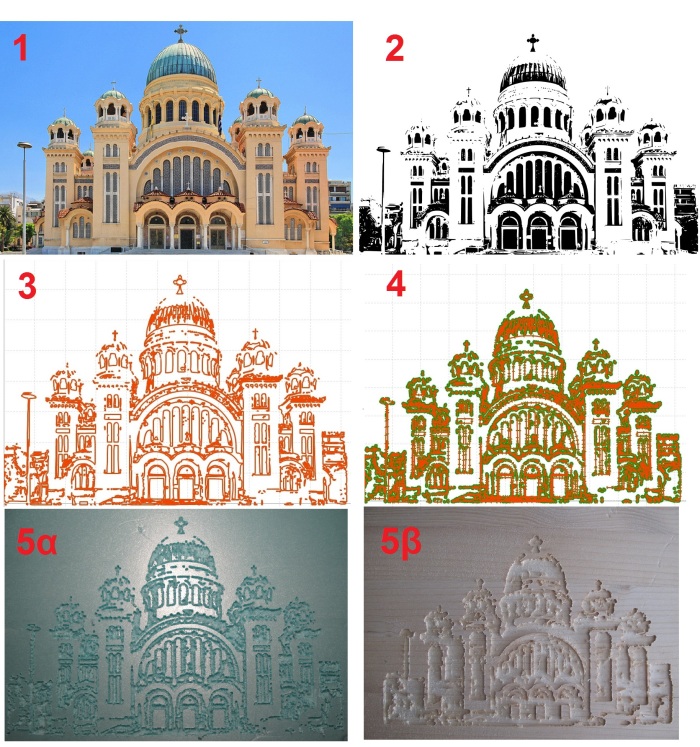
Αν προβάλουμε τα διαδοχικά στάδια της μετατροπής της εικόνας μέχρι να χαραχτεί, θα βλέπαμε το εξής:
Το παρακάτω video δείχνει στιγμιότυπα της χάραξης του Ι.Ν. Αγίου Ανδρέα Πάτρας, πάνω σε υλικό Dow.
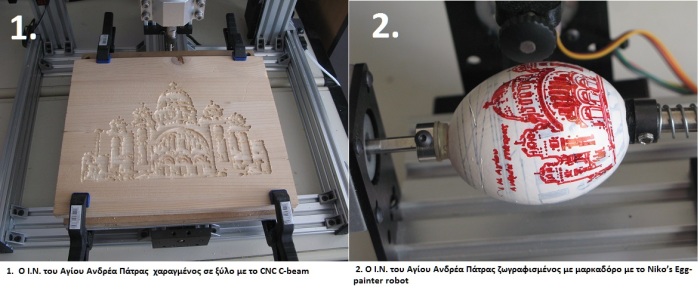
Αλλάζοντας υλικό και ρομπότ και χρησιμοποιώντας το ίδιο αρχείο, έχουμε τα ανάλογα αποτελέσματα. Εδώ και πάλι ο Ι.Ν. Αγίου Ανδρέα Πάτρας αποτυπωμένος σε ξύλο, με το ρομπότ C-Beam, καθώς και σε αυγό με το Niko’s Egg-painter robot.
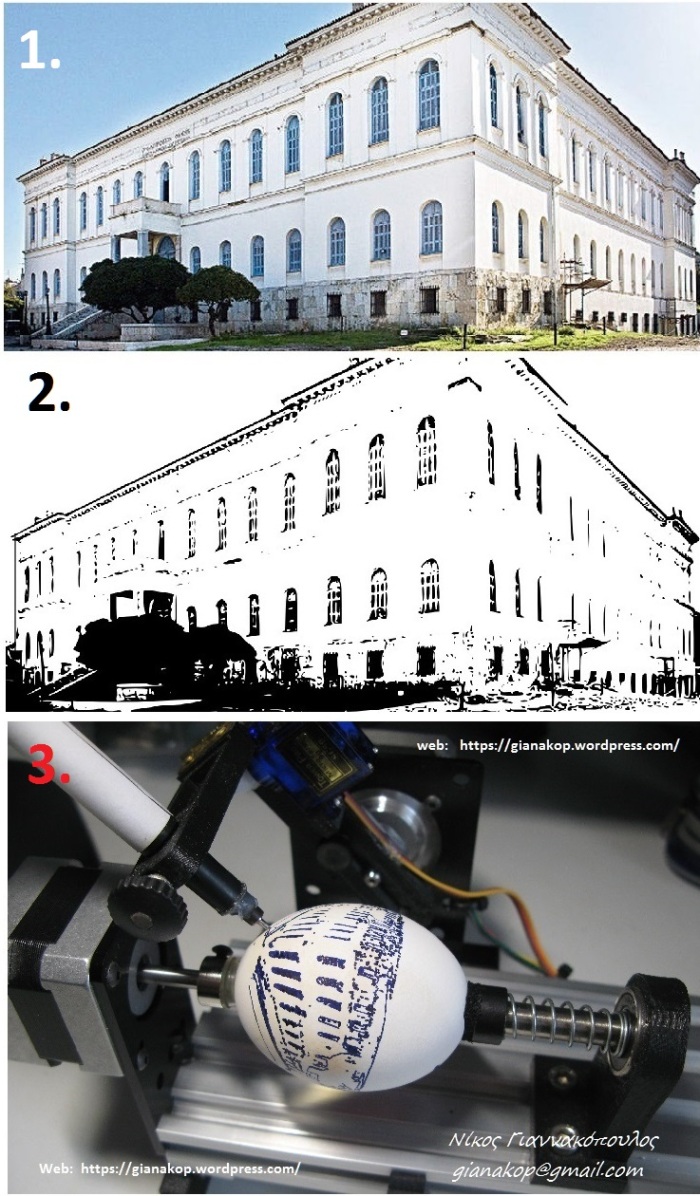
Παράδειγμα 2: Αποτύπωση Σκαγιοπούλειου επάνω σε αυγό.
Και σε αυτό το παράδειγμα ακολουθώντας την ίδια διαδικασία, επέλεξα μία εικόνα του Σκαγιοπουλείου από το internet (1), η οποία μετατράπηκε σε διανυσματική με χρήση του Inkscape (2) και τελικά εκτυπώθηκε πάνω σε αυγό με το Niko’s Egg-painter robot (3).
Το παρακάτω video δείχνει στιγμιότυπα της χάραξης του του Ι.Ν. Αγίου Ανδρέα Πάτρας, καθώς και του Σκαγιοπουλείου πάνω σε ένα αυγό.
Μπορείτε να κατεβάσετε παραπάνω αρχεία για να τα δοκιμάσετε σε δικές σας CNC μηχανές εδώ:
Κλείνοντας αυτό το άρθρο θέλω να τονίσω ότι τα δύο παραπάνω ρομπότ CNC τα οποία χρησιμοποιώ, είναι ανοικτά και μπορεί κάποιος να τα κατασκευάσει μόνος του, γλιτώνοντας αρκετό κόστος από το να αγοράσει κάτι έτοιμο. Σε περίπτωση όμως που κάποιος θέλει να αγοράσει ένα έτοιμο CNC και πάλι μπορεί να χρησιμοποιήσει την παραπάνω μέθοδο που περιγράφω για να μετατρέψει αρχεία και να αποτυπώσει δικές του εικόνες με το μηχάνημά του. Τα λογισμικά που περιγράφω είναι ελεύθερα και τα βρίσκετε δωρεάν και σας παρέχουν απόλυτη ελευθερία να δημιουργήσετε και να αποτυπώσετε σε οποιοδήποτε ρομπότ τύπου CNC, τις δικές σας εικόνες, με οποιαδήποτε περιεχόμενο και θεματολογία πέρα των πολιτιστικών μνημείων, όπως στο συγκεκριμένο Project.
(Άρθρο: Νίκος Γιαννακόπουλος,ΠΕ19 καθηγητής Πληροφορικής και Μαθηματικών).